
Segundo as estatísticas do Instituto da industria de condución non tripulada de nova estratexia, máis de 200 eventos de financiamento importantes foron divulgados na industria da condución autónoma no país e no estranxeiro en 2021, cun importe total de financiamento de case 150.000 millóns de yuans (incluíndo IPO). Dentro, case 70 eventos de financiamento e máis de 30.000 millóns de yuans foron recadados por provedores de produtos e solucións non tripulados de baixa velocidade.
Nos últimos dous anos, xurdiron escenarios de entrega non tripulada, limpeza non tripulada e desembarco de almacenamento non tripulado, e a forte entrada de capital empuxou os vehículos non tripulados á "vía rápida" do desenvolvemento. Co desenvolvemento da tecnoloxía de fusión de sensores multimodo, representantes pioneiros entraron no equipo "profesional", realizando varias tarefas como limpeza de estradas, publicacións e envíos rápidos, envíos, etc.

Vehículos de limpeza non tripulados en traballo
Como "futuro vehículo vocacional" que substitúe á man de obra, as solucións de evitación de obstáculos aplicadas non deben ser descuidadas para gañar na industria emerxente, e o vehículo debe estar facultado segundo o escenario de traballo, como o vehículo non tripulado na industria do saneamento. debería ter a función de identificación de stocks; coa función de evitar obstáculos seguros na industria da entrega; coa función de prevención de riscos de emerxencia na industria do almacenamento……
- Industria do saneamento: unha trinidade de sensores intelixentes scheme

Industria do saneamento - Presentación do esquema de detección intelixente Trinity
O robot Candela Sunshine "máis limpo" dos Olímpicos de Inverno de Pequín utiliza un esquema de detección intelixente trinitaria, equipado con 19 radares ultrasónicos, que permiten ao robot evitar obstáculos, prevención de desbordamento e funcións anti-dumping.
Aredondoevitación de obstáculos
A parte traseira está equipada con 2 radares ultrasónicos para o seguimento e aviso de obstáculos en marcha atrás, 3 radares ultrasónicos baixo a parte frontal e 6 radares ultrasóns nos lados para funcións de avance e evitación de obstáculos horizontal, vertical e oblicuo.
Prevención de desbordamento
Instale un sensor na parte superior da zona de carga do vehículo para realizar a función de seguimento da situación de carga e garantir que a capacidade de carga cumpre os estándares de seguridade.
Antidumping
Evita que a sección dividida se envorque debido a forzas externas en estado sen carga ou pouco cargada, poñendo en perigo a seguridade cidadá.
- Industria de entrega:integralevitación intelixente de obstáculos scheme
Industria de entrega: demostración parcial do esquema intelixente de evitación de obstáculos
En comparación coa loxística de longo percorrido, o núcleo do escenario da industria de reparto reside no curto percorrido e a alta frecuencia, o que significa que os vehículos de reparto non tripulados deben deseñarse para ser máis flexibles e seguros para facer fronte a escenarios urbanos complexos, como o transporte de edificios. e evitación de obstáculos nas rúas. DYP proporcionou a Zhixing Technology un completo esquema intelixente de evitación de obstáculos, facendo que o seu produto se converta en vehículo de entrega non tripulado para ser probado nun ambiente semiaberto en China.
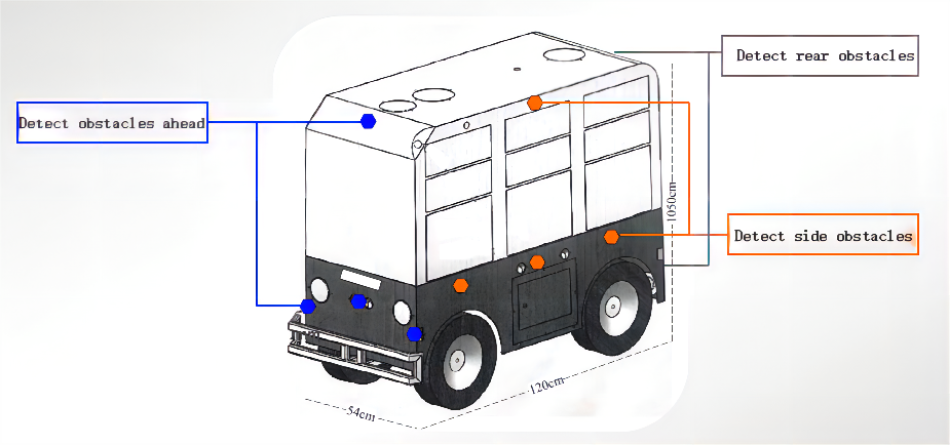
Evitación de obstáculos dianteiro e traseiro
Un radar ultrasónico está instalado na parte superior da parte dianteira e traseira para detectar obstáculos máis altos, como postes de restrición de altura; tres radares ultrasónicos están instalados na parte inferior da parte dianteira e traseira para detectar obstáculos laterais baixos e frontales, como postes de restrición. Ao mesmo tempo, os radares ultrasónicos nos extremos dianteiro e traseiro son capaces de asegurar o vehículo non tripulado para dar marcha atrás ou virar.
Evitación de obstáculos laterais
Un radar ultrasónico está instalado enriba de cada lado para detectar obstáculos laterais altos e axudar a activar a función de entrega rápida; tres radares ultrasónicos están instalados debaixo de cada lado para detectar obstáculos laterais baixos, como bordos de estradas, cintos verdes e postes de pé. Ademais, os radares ultrasónicos dos lados esquerdo e dereito poden atopar o "espazo de aparcamento" adecuado para o vehículo non tripulado e completar o aparcamento automático con éxito.
- Industria de almacenamento: evitación de emerxencias e optimización de rutaszación scheme

Diagrama de evitación de obstáculos AGV
Os vehículos non tripulados de almacén común sitúanse para a planificación de rutas locais a través de solucións tecnolóxicas de infravermellos e láser, pero ambos están afectados pola luz en termos de precisión e poden producirse riscos de colisión cando se cruzan varios carros nun almacén. Dianyingpu ofrece solucións de optimización de rutas e evitación de riscos de emerxencia para a industria do almacén que non se ven afectadas pola luz, utilizando radares ultrasónicos para axudar ao almacén AGV a evitar obstáculos de forma autónoma nos almacéns, aparcamento oportuno e preciso en tempos de crise para evitar colisións.
Emerxenciaevitación
Cando o radar ultrasónico detecta que un obstáculo entra na zona de aviso, o sensor alimentará a información de orientación do obstáculo máis próximo ao carro non tripulado ao sistema de control AGV a tempo, e o sistema de control controlará o carro para reducir a velocidade e frear. Para aqueles obstáculos que non se atopen na zona adiante do carro, aínda que estean preto, o radar non avisará para garantir a eficiencia do traballo do carro.
Ruta óptimazción
O vehículo non tripulado utiliza a nube de puntos láser combinada co mapa de alta precisión para a planificación local de camiños e obter unha serie de traxectorias a seleccionar. Despois, a información do obstáculo obtida por ultrasóns proxéctase e calcúlase cara atrás ao sistema de coordenadas do vehículo, as traxectorias obtidas a seleccionar son máis filtradas e corrixidas, finalmente derívase a traxectoria óptima e o movemento cara adiante baséase nesta traxectoria.

- Capacidade de alcance ata 5 m,punto cego tan baixo como 3 cm
- Estable, non afectado pola luz ecor da medida obxecto
- Alta fiabilidade, coñece orequisitos de clase de vehículos
Hora de publicación: 30-ago-2022